|
We aim to use the parallel computation power of today’s GPUs for time- and memory-efficiently solving large-scale
IHPs under periodic boundary conditions with the density
representation. However, it is challenging to make full use
of the computing resources of GPU to realize the solver. The
reasons are twofold.
First, since the solver contains multiple
steps with different computational profiles, the choice of data
structures and algorithms should be considered globally to
be suitable for every step.
Second, as the GPU memory is
limited, the memory usage should be reduced to adapt to
high resolution while ensuring accuracy and high efficiency.
Methods
|
Data structure tailored to solve IHPs.
For each vertex of each level’s mesh,
we store the numerical stencil, the displacement, the
force, and the residual in the multigrid implementation.
The numerical stencil consists of 27 matrices of dimension 3×3, each of which corresponds to one adjacent vertex. By employing mixed floating-point precision, a balance between computational accuracy and performance can be achieved. Nodal vectors are all stored in the Structure of Array (SoA) format. The numerical stencils are stored in Array of Structure (AoS)
format. In our GPU implementation, we pad a layer of vertices and
elements around the mesh.
Dedicated multigrid solver
Due to the loss of precision caused by the mixed-precision scheme and the high resolutions, the multigrid solver may diverge with a numerical explosion. We find in practice that these situations may be caused by insufficient Dirichlet boundary conditions and no materials at corners during optimization. To handle such a problem, we remove the component belonging to the numerical stencil’s null space from the restricted residual before
solving the system on the coarsest mesh.
|
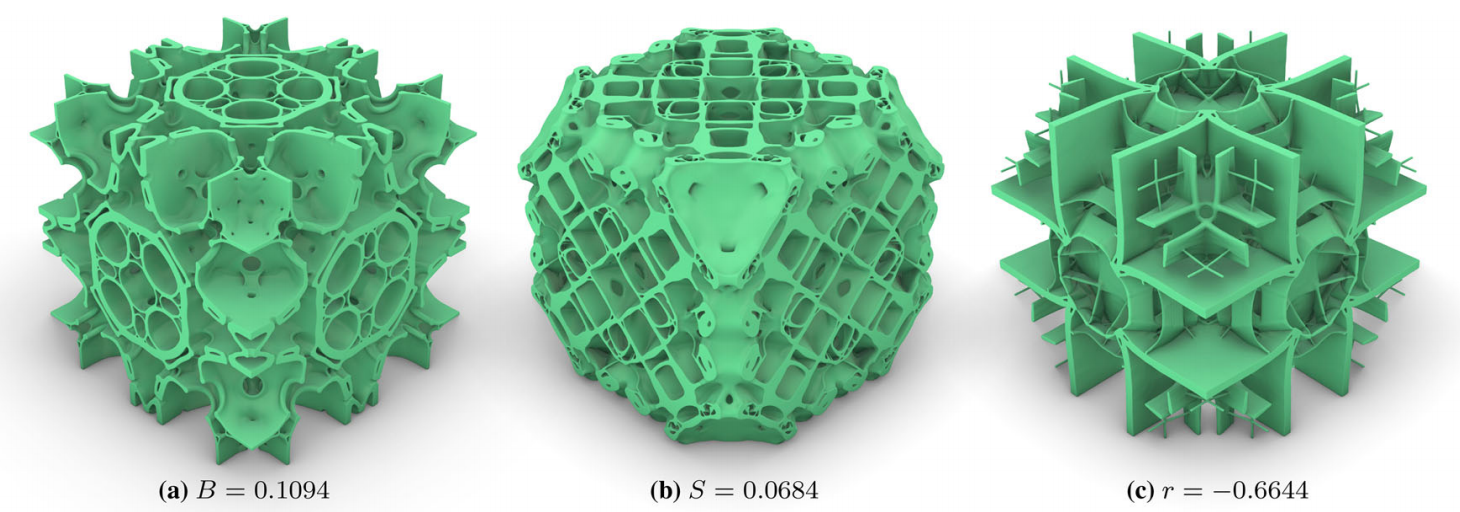
Results
We optimize three different objectives: bulk modulus, shear modulus, and negative Poisson’s ratio. The cubic domain is discretized with 8-node brick elements. Symmetry is essential for designing isotropic material. We have predefined three symmetry types:
reflect3: the reflection symmetry on three planes
{x = 0.5, y = 0.5,z = 0.5} of the cube domain;
reflect6: the reflection symmetry on six planes {x =
0.5, y = 0.5,z = 0.5, x + y = 0, y + z = 0,z + x = 0}
of the cube domain;
rotate3: rotation symmetry means that the structure is
invariant under the rotation of 90◦ around the x, y, z axes that pass through the cube domain’s center, as same under
their compositions.
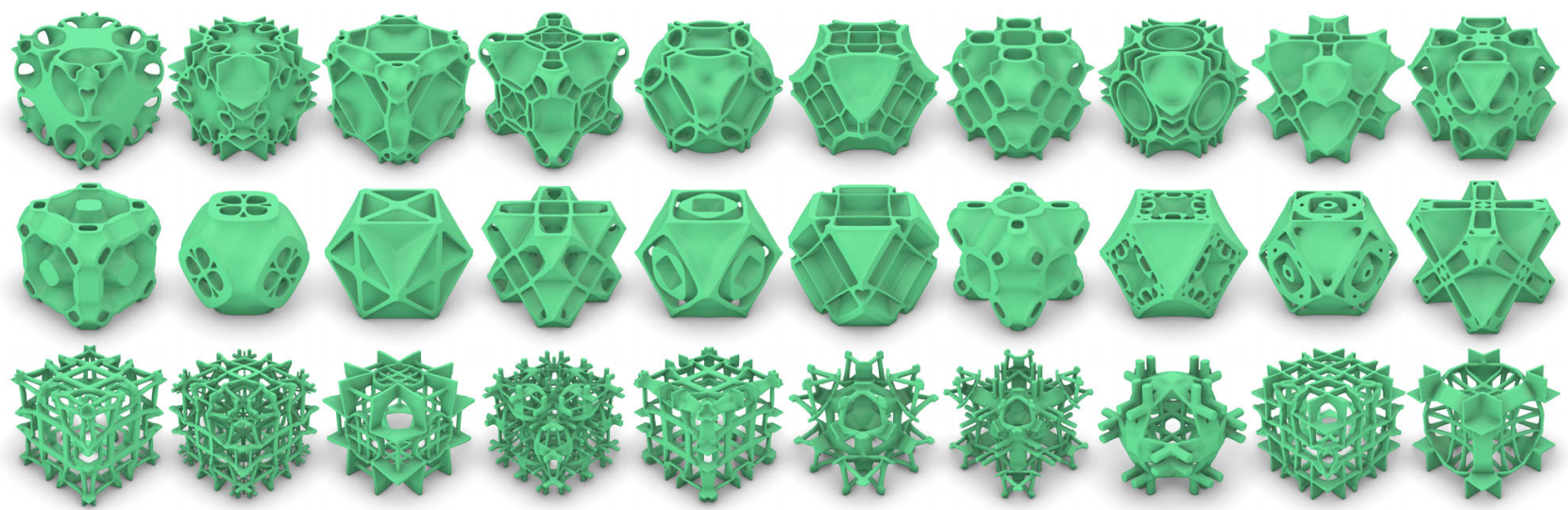
Figure 2:
Gallery of our optimized microstructures with the resolution 128 × 128 × 128. We use different initial density fields for optimization. Different initial density fields lead to different results, which are different local optimal solutions. Trigonometric functions are adopted to cover various initial density fields.
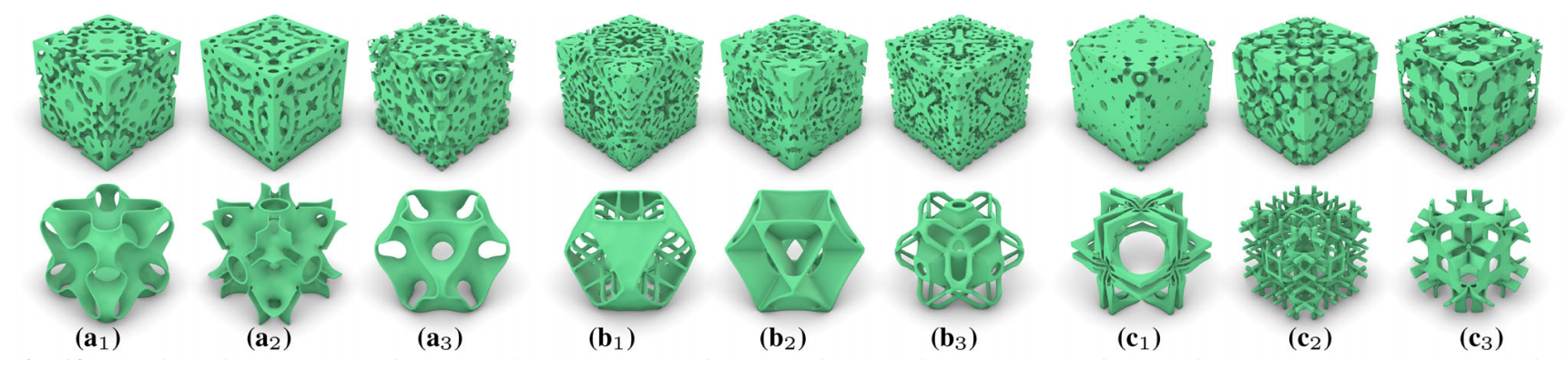
Figure 3:
Different initial density fields (upper row) and optimized results (bottom row) are given for bulk modulus maximization (a1)-(a3), shear modulus maximization (b1)-(b3), and negative Poisson’s ratio materials (c1)-(c3) with 128 × 128 × 128 elements under the volume fraction 10%.
We implement the multi-CPU framework Aage et al. (2015)
and conduct the experiments on a cluster with a total of 9
nodes, each equipped with two Interl Xeon E5-2680 v4 28-
core CPUs and 128GB memory connected by Intel OPA.
The final structures and moduli obtained
by both frameworks are very similar. The average time of
each iteration for the Multi-CPU framework is around 40.0
s, while our framework achieves a significantly reduced average time cost of 4.4 s.
Users can optimize material properties according to their own goals through our framework.
|
Download
|
BibTex
@article {zhang2023Micro,
title = {An Optimized, Easy-to-use, Open-source GPU Solver for Large-scale Inverse Homogenization Problems},
author = {Zhang, Di and Zhai, Xiaoya and Liu, Ligang and Fu, Xiao-Ming}
journal = {Structural and Multidisciplinary Optimization},
volume={66},
number={207},
year = {2023},
doi ={10.1007/s00158-023-03657-y}
}
|
Welcome to cite this work!
If there is any problem while using, please send a message to [ xiaoyazhai@ustc.edu.cn ]
|